Die Nutzung von Robotern ist der Arbeitswelt in Werkshallen der Automobiltechnik oder des Anlagenbaus seit langem vertraut. Große schwere Schwenkarme heben und drehen erhebliche Gewichte. Ein Schutzzaun umgibt das in den Boden einzementierte bzw. fest verankerte Instrument, um Verletzungen von Menschen zu vermeiden.
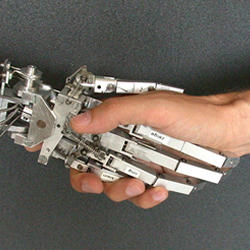
In dieses Bild von Robotik dringen nun – spätestens seit der Hannover Messe 2015 – das Design und die Fähigkeiten der neuen kleinen Leichtmetall-Roboter ein. Sie sind in der Regel so groß wie ein Kind, können gerne zum Transport unter den Arm genommen werden und lassen sich problemlos auf den Schreibtisch als neues „Gegenüber“ platzieren. Sie werden mit Hilfe von Gestik in Minutenschnelle von jedem Laien „trainiert“, man könnte auch sagen: eingewiesen. Sie speichern alle Bewegungen und verfügen bald über ein großes Reservoir an nutzbaren Gesten.
Diese – in der Regel menschenähnlichen Roboter (humanoide Roboter) – sind flexibel einsetzbar: heute in der Handwerkswerkstatt, morgen in der Fabrikhalle und übermorgen als Assistenz im Pflegeheim. Die besondere „Eigenschaft“ dieser „Soft Robots“ besteht darin, dass sie bei einer Berührung mit dem Menschen sofort stoppen. Ein Zusammentreffen von Roboter und Mensch, bei dem sich der Mensch verletzt, ist somit beinahe ausgeschlossen. Diese „weichen“ Roboter bilden den „Partner“ des Menschen in der neuen „Collaboration“ (Mensch-Roboter-Interaktion / Human-Robotic-Interaction HRI). Dieses neue „Duo“ bildet einen wichtigen technisch-innovativen Baustein der neuen „Arbeit 4.0“.
Wie aber soll der „Soft Robot“ gestaltet werden? Was soll er können? Was darf er nicht können? Wie soll er aussehen? Soll er dem Menschen ähneln oder bewusst wie eine fremde Maschine aussehen? Müssen wir „Vertrauen“ zum „Kollegen Soft Robot“ entwickeln oder besser er in uns?
Manfred Buerger says:
Auch hier (s.a. Kommentar zu „Von der Assistenz zur Delegation“): Lernverhalten/Feedback muss an die menschliche Ziel-Bestimmung gebunden werden. Wie soll dann der Arbeitsprozess aussehen, d.h. vor allem, wie soll Fehler-Kontrolle stattfinden, wie werden Erfahrungen von den menschlichen Akteuren gewonnen und prozessbestimmend (über Modellierung und Programmierung) verarbeitet und umgesetzt? Dabei ist eine Entkoppelung von systemischen Vorgaben und Sachzwängen anzustreben, selbst im Interesse des Kapitals, um Innovatives zu ermöglichen. Wie also ist der Arbeitsprozess, das Zusammenwirken von Roboter und Mensch in dieser Perspektive zu gestalten?